
研究紹介
水を含むハイドロゲルを活用した水中アニマロイド「ゲルクラゲ」によるディスプレイ表現技術
ハイドロゲルは非常に柔らかく脆いため、通常は直方体のような単純な形状で作られます。これらの単純な形状のゲルは主に分析用の試料として使用され、体内組織の代替など、形状依存性の低い用途に適しています。しかし、自然界の多くの生物や臓器は複雑な形状を持ち、ゲルの特有な材料機能性を持っています。このような生態系の再現には、ソフトロボティクスやバイオミメティクスの分野で柔らかい身体を再現する方法論が頻繁に議論されています。しかし、これらのロボットは剛性に大きな差がある部品が同時に使用されることが多く、柔軟性と機能性のバランスを取ることが課題となっています。
企業様との共同研究の充実と成果の実現へ。

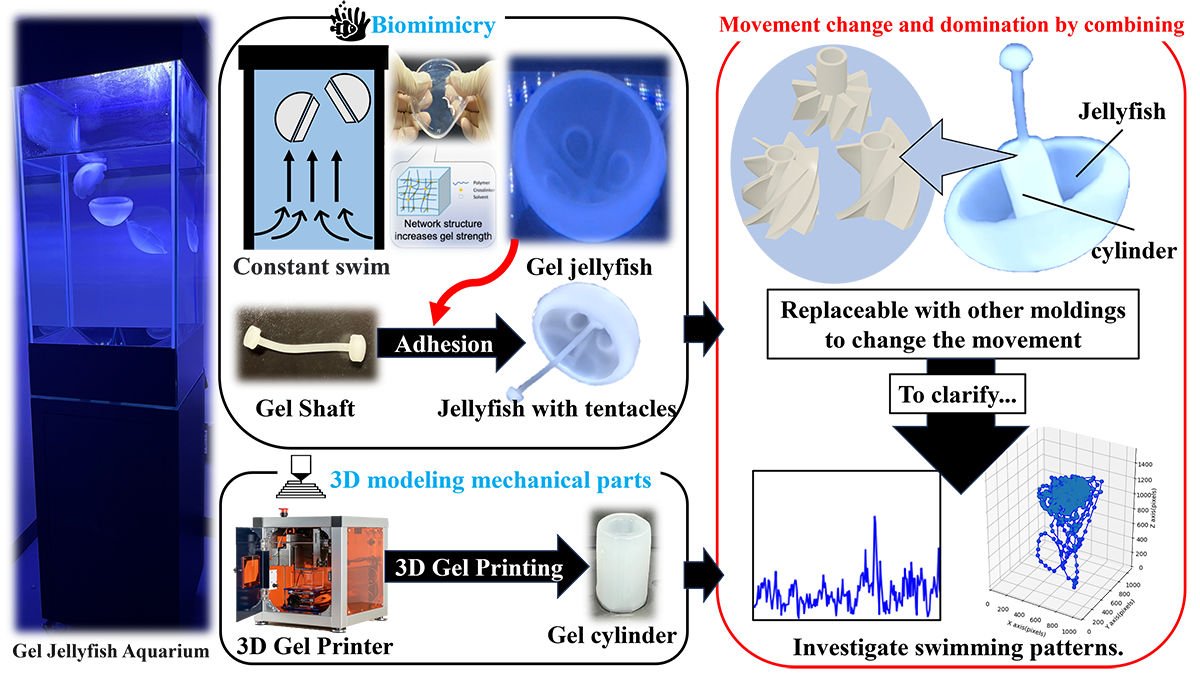
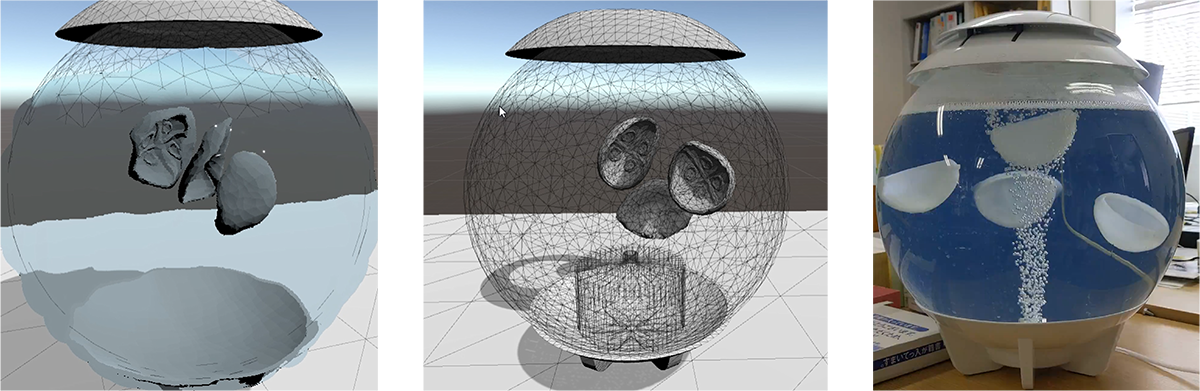
最近の研究では、ソフトマテリアルを多様な形状に設計するために3Dプリンティング技術が利用されています。この技術の進化により、ハイドロゲルの3D形状を作成することが可能となり、特に水中で機能する柔軟な構造物の設計が進められています。私たちは、水流のみで駆動する本物のクラゲに近い外観を持つゲルクラゲを開発しました。このゲルクラゲは、水槽の底からの水流によって動き、その動きは色の変化する照明によってさらに魅力的になります。この研究では、3Dゲルプリンティング技術を用いてゲルクラゲの動きを変化させる機構を開発し、よりリアルな生物模倣を目指しました。
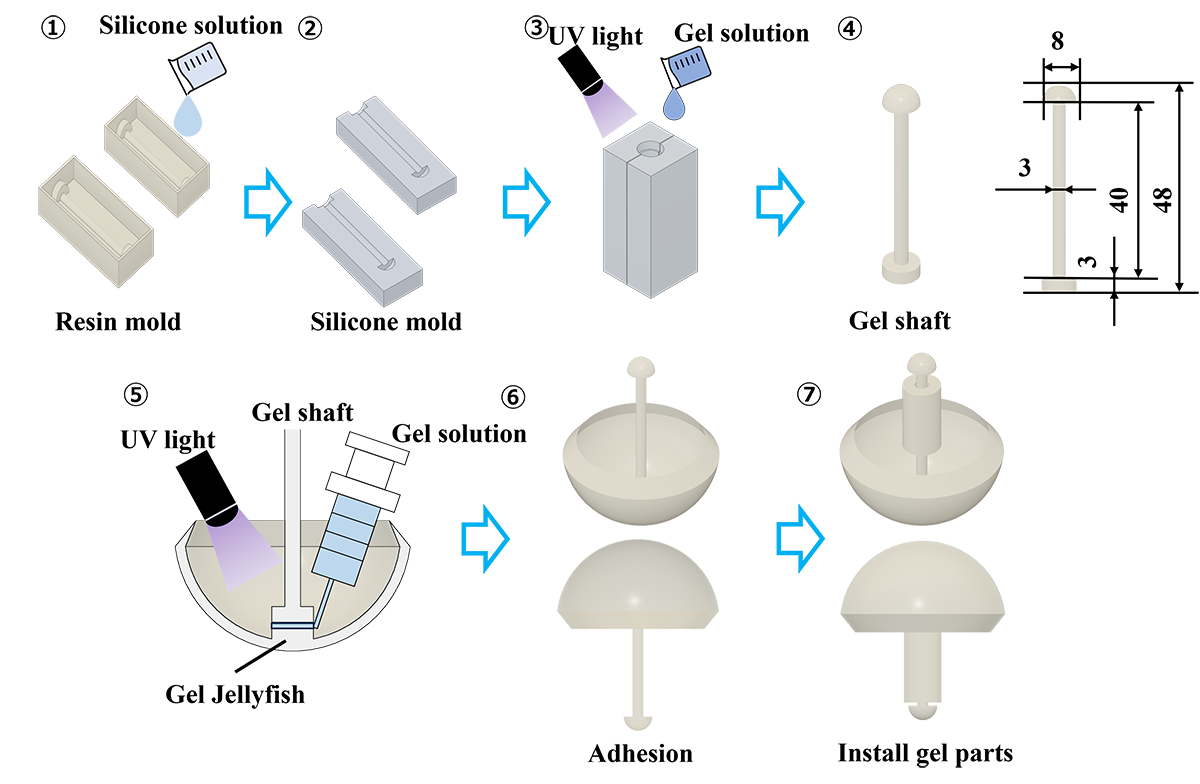
本研究で使用するゲルは、ICNゲルと呼ばれるもので、複数種の網目構造が架橋剤によって絡み合って形成される相互架橋網目構造を持っています。このICNゲルを使用して、3Dプリンター「GelPiper」を用いて様々な形状のゲル部品を造形しました。例えば、ゲルクラゲにシリンダー形状のゲル部品を取り付け、その遊泳軌跡を観察し、解析しました。ゲルクラゲの外観は本物のミズクラゲを再現しており、すべてゲルで構成されています。
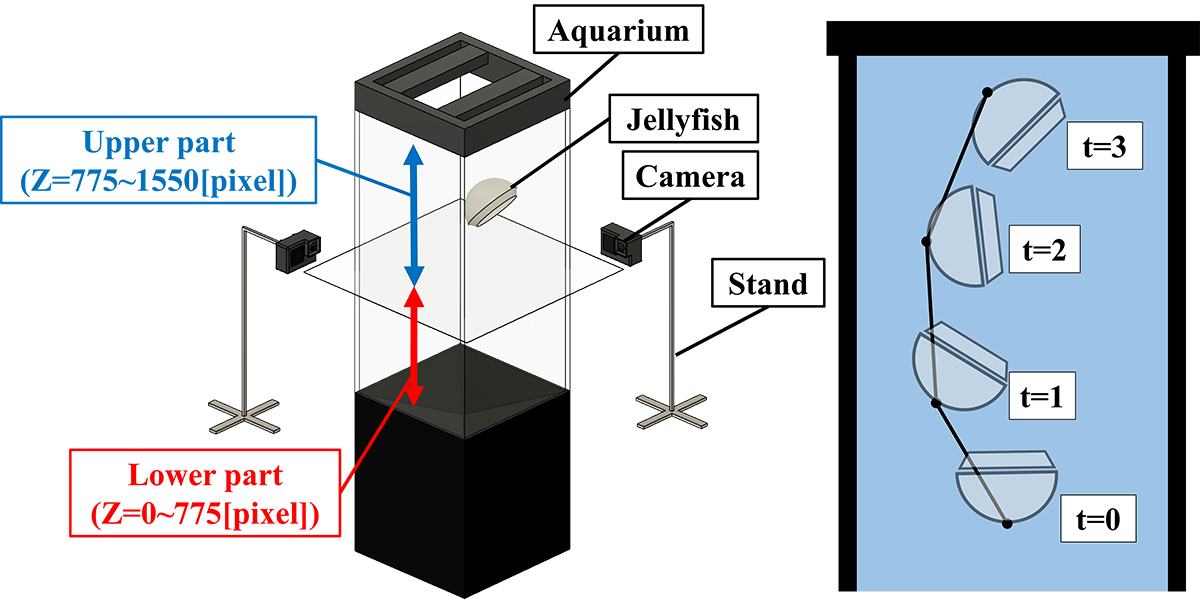
実験では、異なる取り付け方法によるゲルクラゲの遊泳パターンの変化を調査しました。シリンダーを取り付けた場合と取り付けない場合、またシリンダーを固定した場合と遊びを持たせた場合の違いを比較しました。結果として、シリンダーを固定したゲルクラゲは水槽下部での遊泳が増加し、シリンダーを取り付けずに遊びを持たせた場合は、上下に移動するパターンが見られました。このことから、形状の特徴が遊泳に与える影響を調査する際には、分離させる手法が有効であると結論付けました。
今後は、この分離手法を主軸として、異なる形状のゲル部品を使用し、さらなる遊泳パターンの変化を調査していきます。
これにより、より多様な環境で機能するソフトロボットの設計とディスプレイ表現技術としての応用が期待されます。
| Year | Name | Title | Conference |
|---|---|---|---|
| 2020 | Jun Ogawa, Naoya Yamada, Yosuke Watanabe, Ajit Khosla, Masari Kawakami, Hidemitsu Furukawa | Design of Hydrogel Material and 3D-Printed Molding for Imitating the Tactile Textured Properties of Moon Jellyfish | ECS PRiME2020 |
| 2023 | 小林竜也, 茅原 琢斗, 小川純, 渡邉洋輔, MD Nahin, Islam Shiblee, 古川英光 | 形状記憶合金を用いたセラピーソフトロボット「ゲルクラゲ」の遊泳駆動機構の検討 | 第41回日本ロボット学会学術講演会 |
| 2023 | 茅原琢斗, 小林竜也, 小川純, 渡邉洋輔, エムディナヒンイスラムシブリ, 古川英光 | クラゲと水草の共生を表現するアクアリウムセラピー型浮遊培養地 | Conference on 4D and Functional Fabrication 2023 |
| 2023 | 茅原琢斗, 小林竜也, 小川純, 渡邉洋輔, エムディナヒンイスラムシブリ, 古川英光 | ゲルクラゲの傘形状に依存した遊泳軌道の解析 | 第24回計測自動制御学会システムインテグレーション部門講演会 |
| 2024 | 茅原琢斗, 小川純, 古川英光 | 3D ゲルプリンティングを駆使した完全な柔軟材料で構成されるゲルクラゲの 遊泳パターン生成 | 第23回複雑系マイクロシンポジウム |
| 2024 | 茅原琢斗, 小川純, 古川英光 | 透明なゲルリンク機構によるゲルクラゲの収縮運動の誘発の検討 | ロボティクス・メカトロニクス講演会2024 |