
研究紹介
生体模倣と味の融合:
ロボットの可食化プロジェクト
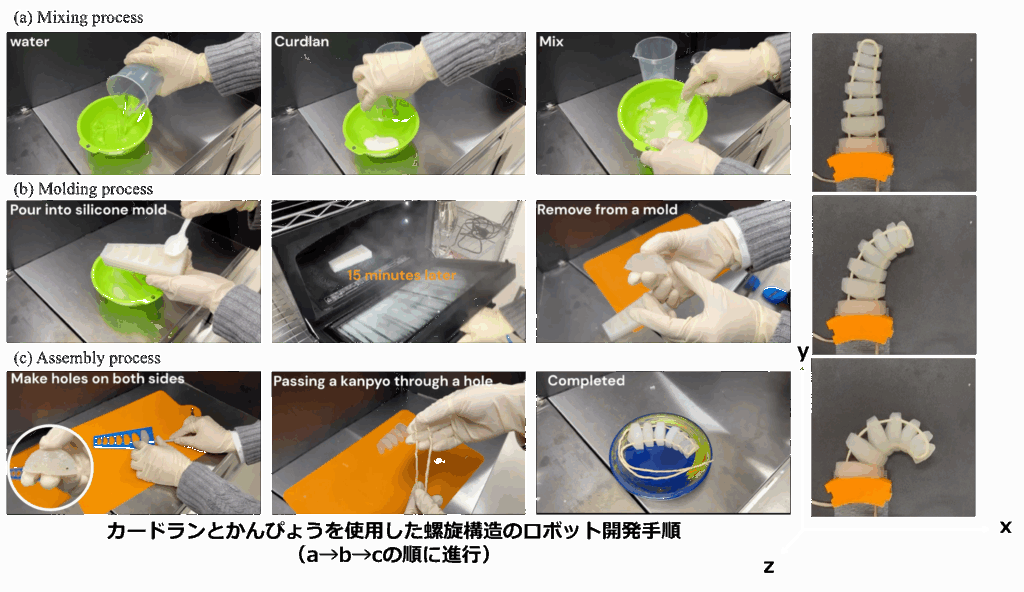
私たちは、食べることができる生体模倣ロボットの開発を通じて、「可食化」という新たな研究領域の確立を目指しています。この研究では、螺旋形状に触発されたロボットを、無味無臭の可食材料「カードラン」と自然素材「かんぴょう」を用いて製作しました。このロボットは実際に食べることができると同時に、柔軟な曲げ動作が可能です。
企業様との共同研究の充実と成果の実現へ。
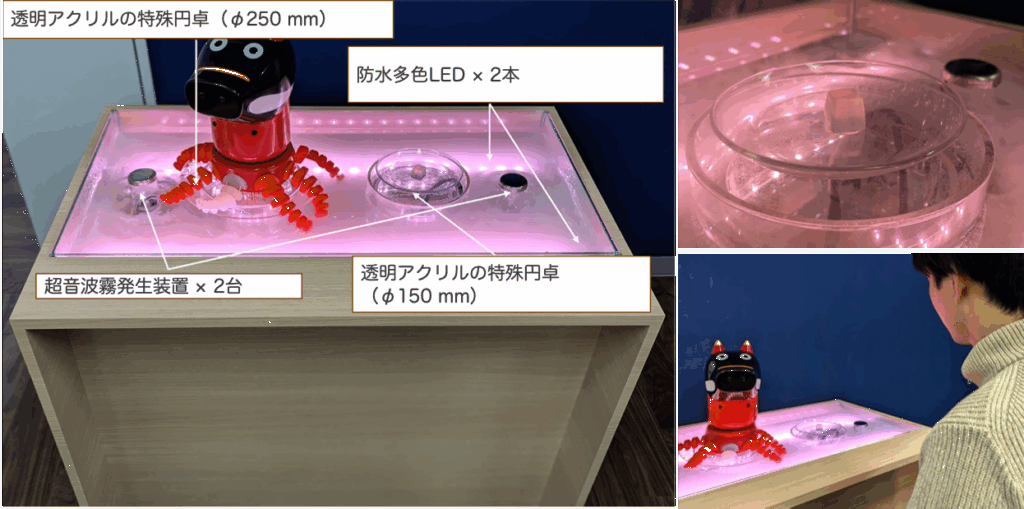
ロボットに使われる可食材料は、成形性や耐久性を重視する必要がある一方で、自由な味付けには制限があります。そこで本研究では、「味」を直接的に付加するのではなく、人間の視覚と味覚の連動性に着目し、LEDによる光演出と超音波ミストを組み合わせた「演出食卓」を開発しました。
この演出筐体のもとでロボットを実食してもらう官能評価を実施した結果、青色や桃色の光では甘味が低く感じられ、黄色や青紫色では塩味が強調されるなど、特定の光が味覚評価に影響を与えることが示されました。

本研究は、食材の味そのものに依存せず、視覚演出によって食体験を拡張できる可能性を示しています。今後はより多様な味覚誘導手法の開発や、可食ロボットの耐久性・嗜好性の向上を目指し、食とロボティクスの新たな融合を探究していきます。
共用・共同研究に関心のある方はぜひご相談ください。
| Year | Name | Title | Conference |
|---|---|---|---|
| 2025 | 今野嘉乃、小川純 | 螺旋構造に触発された 生体模倣ロボットの可食化 – 超音波・光演出による甘味誘導 | ロボティクス・メカトロニクス講演会2025 |