
研究紹介
腹足類を模したウミウシロボットと移動機構「TAYAMES」
腹足類(Gastropods)は、カタツムリやウミウシを含む生物群であり、水中から陸上まで多様な環境に生息しています。これらの生物は、筋肉の収縮によって軟体部に波を発生させ(ペダルウェーブ)、移動を行います。本研究では、このペダルウェーブを軟性材料で再現するソフトロボットを開発しました。このロボットは、ソフトマター部を物理リザバー部として活用し、機械学習による環境適応型のセンシングを実現しています。実験では、移動性能と環境の関係、および機械学習による識別精度を検証しました。
企業様との共同研究の充実と成果の実現へ。
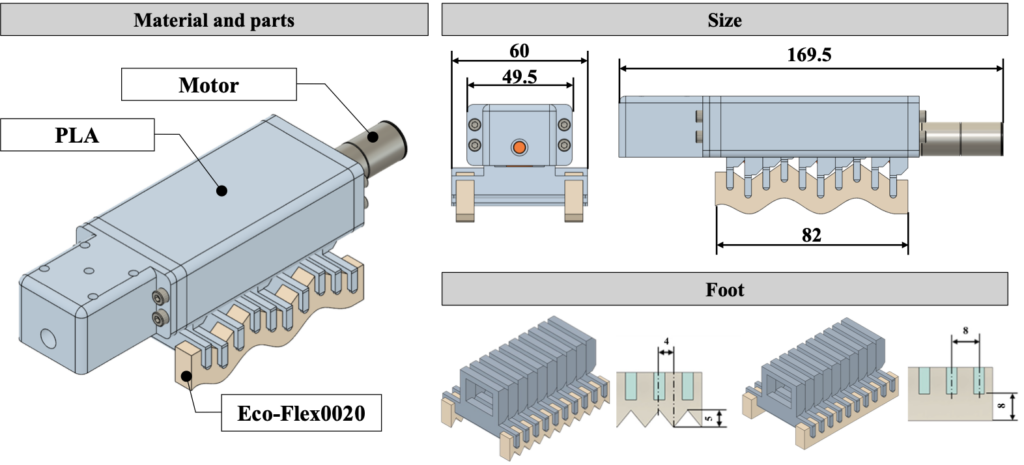
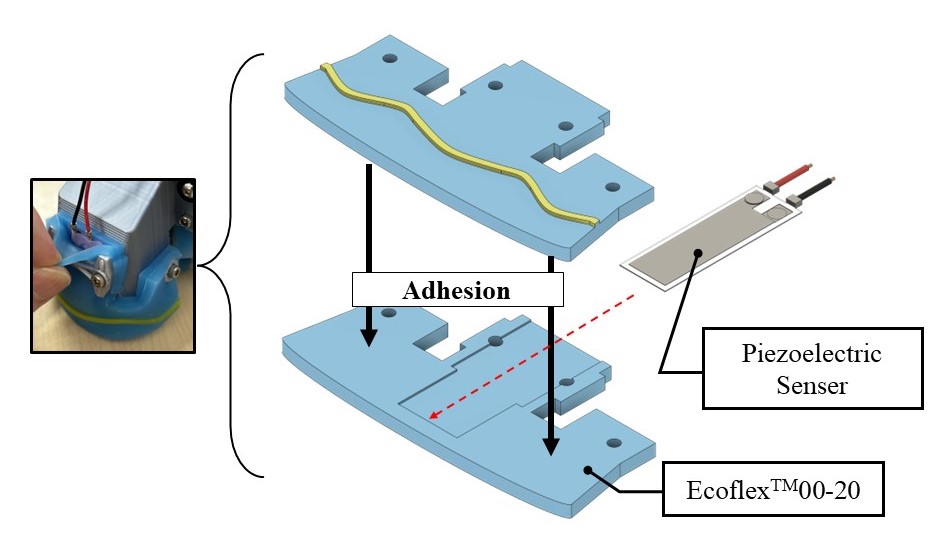
本研究では、ウミウシの移動メカニズムを模倣したソフトロボット「Geltropods」を開発しました。このロボットは、筋収縮によって生じる波(ペダルウェーブ)をソフトマターで再現し、移動を実現します。さらに、圧電センサーを用いた物理リザーバーコンピューティングを採用し、機械学習による環境認識を可能にしました。
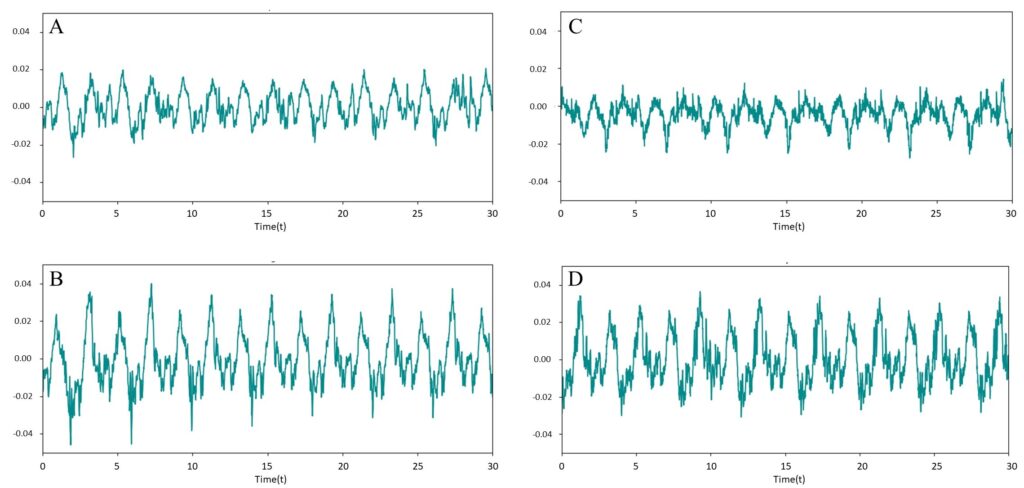
Geltropodsの特徴は、柔軟な素材を活用したセンシング機構にあります。移動時に生じる圧力変化をセンシングし、これをデータとして取得・解析することで、異なる地面環境を高精度に識別できることを確認しました。実験では、異なる材質の地面上での移動性能と環境識別精度を検証し、ロジスティック回帰を用いた分類で最大100%の識別精度を達成しました。
この技術により、Geltropodsは未知の環境でも適応的な移動を可能にし、環境モニタリングや災害救助など幅広い応用が期待されます。
さらなる移動性能の向上と、粘着性を持つゲル素材の導入による適応性の強化を目指します。
| Year | Name | Title | Conference |
|---|---|---|---|
| 2025 | Yoshimune Tayama, Jun Ogawa, Hidemitsu Furukawa | Development of a Soft Robot with Locomotion Mechanism and Physical Reservoir Computing for Mimicking Gastropods | Journal of Robotics and Mechatronics |
| 2024 | 田山佳宗, 小川純, 古川英光 | 圧電センシングを用いた環境認識型ウミウシ型ロボットの検討 | ロボティクス・メカトロニクス講演会2024 |
| 2025 | Yoshimune Tayama, Jun Ogawa, Hidemitsu Furukawa | Effect of Eccentric Shaft Design on the Gastropod-Inspired Mechanism | The 30th International Symposium on Artificial Life and Robotics |