
研究紹介
柔らかい物理レザバーの物性が機械学習のパラメータチューニングに及ぼす影響分析
2020年から流行したコロナウイルスにより、リモートワークの認知が急速に普及し、これに付随する形で家庭内で人々を癒やし、楽しませることができるペットロボットへの関心が高まっています。しかし、従来のペットロボットは硬い素材で作られており、人と接触することでのコミュニケーションが困難です。これに対し、柔らかい素材で作られたソフトロボットは、実際のペットのような触感を提供し、触れ合いを通じた豊かな情報交換を実現します。
企業様との共同研究の充実と成果の実現へ。
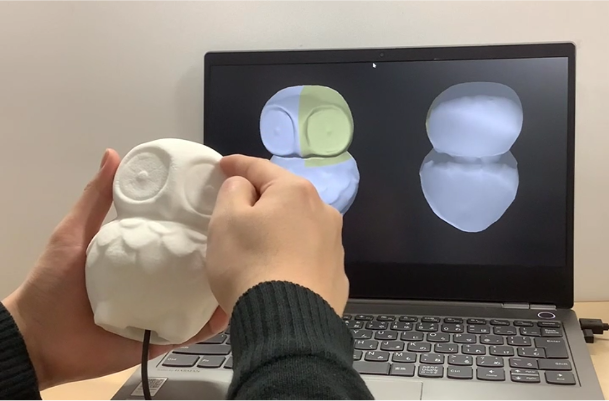
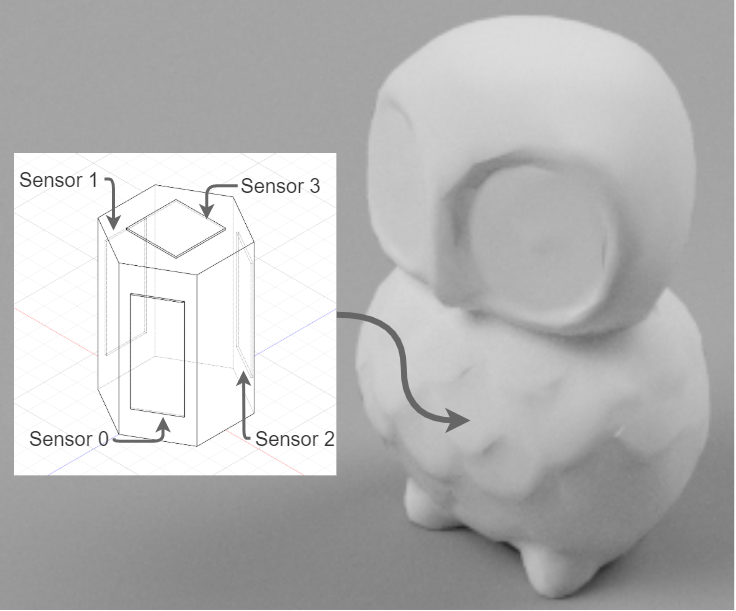
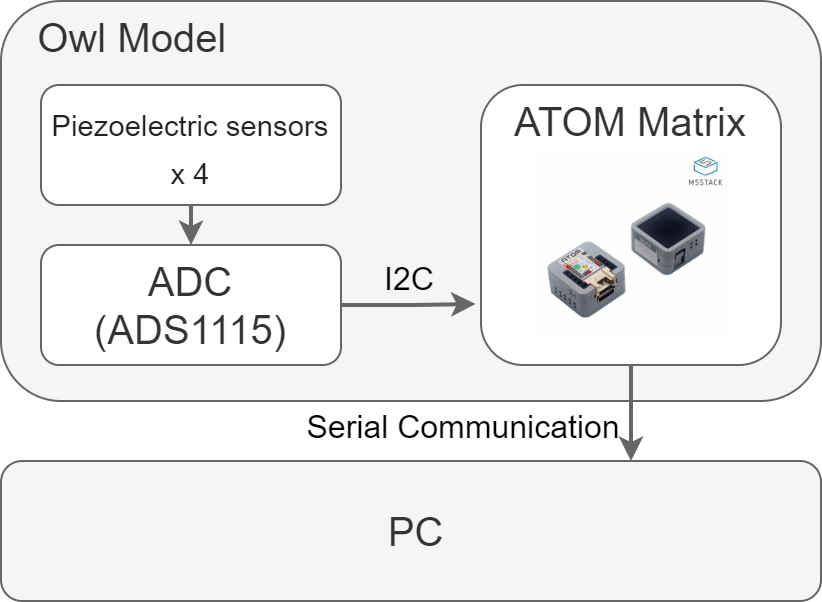
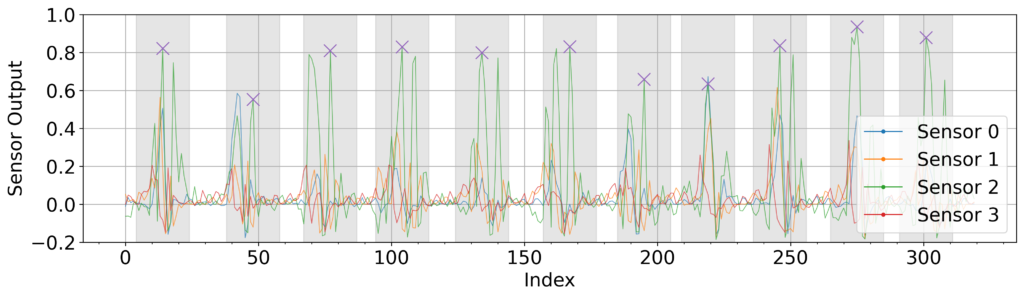
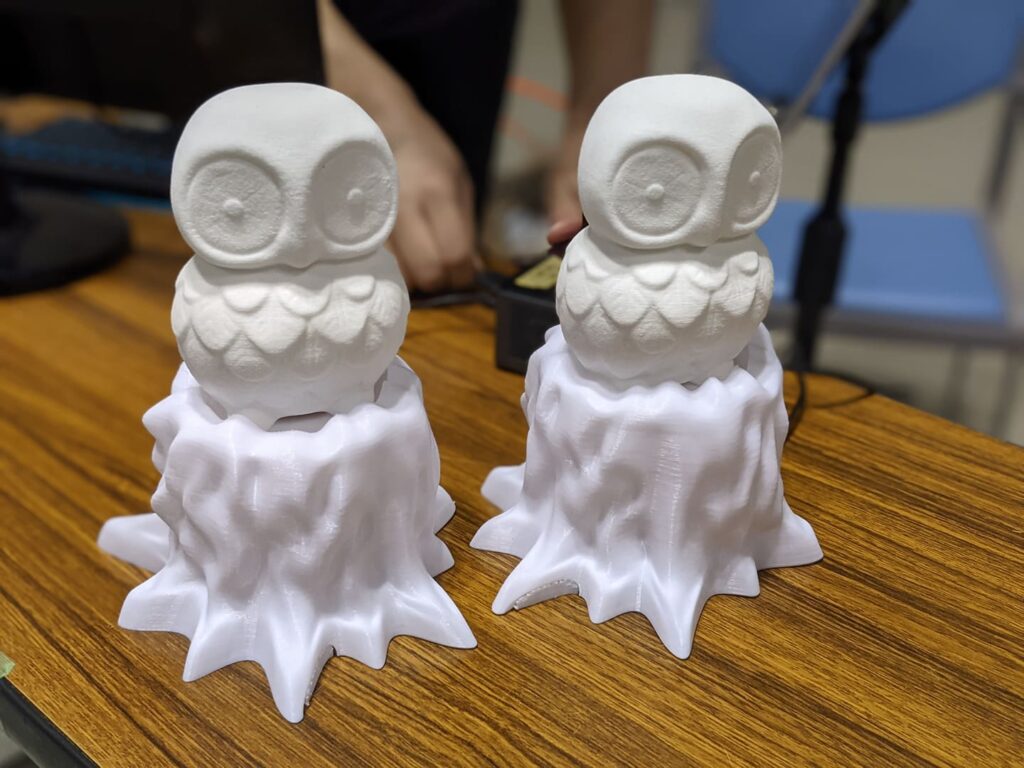
この研究では、異なる柔らかさを持つ2種類のフクロウ型ソフトロボットを開発しました。それぞれのロボットには圧電フィルムセンサーが埋め込まれており、接触した部分の識別精度を評価しました。圧電フィルムセンサーは、外部からの力を電気信号に変換するデバイスで、これを用いてロボットが受ける触覚情報を収集します。


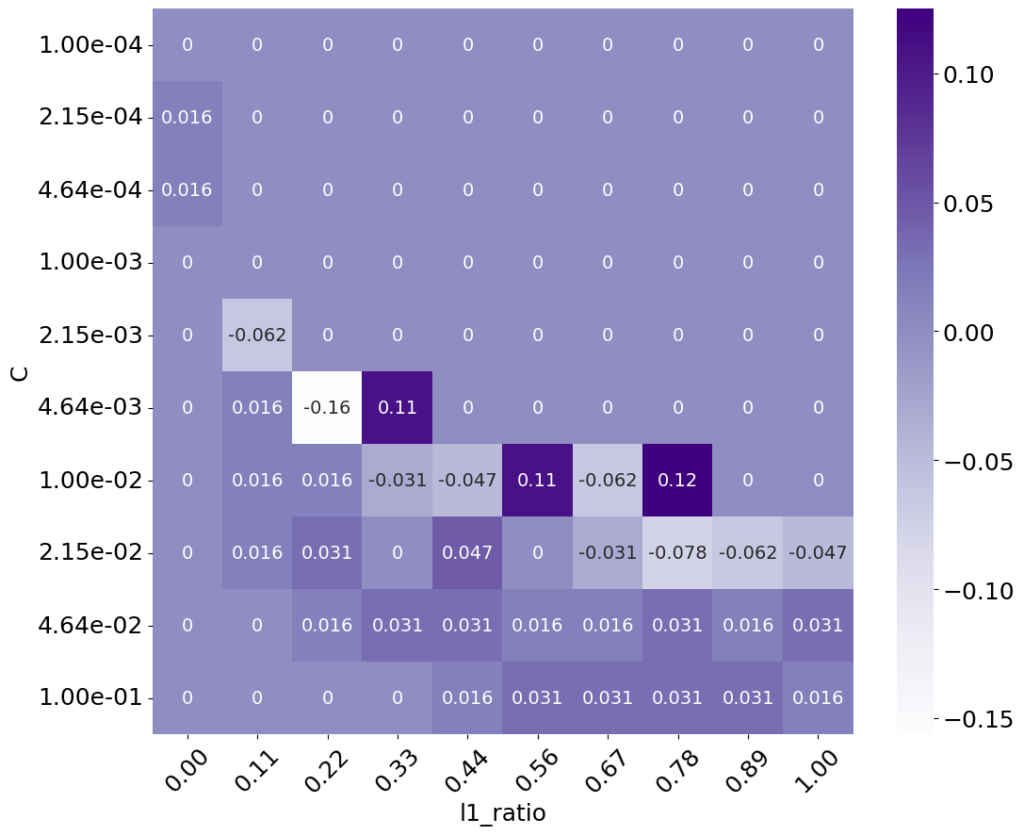
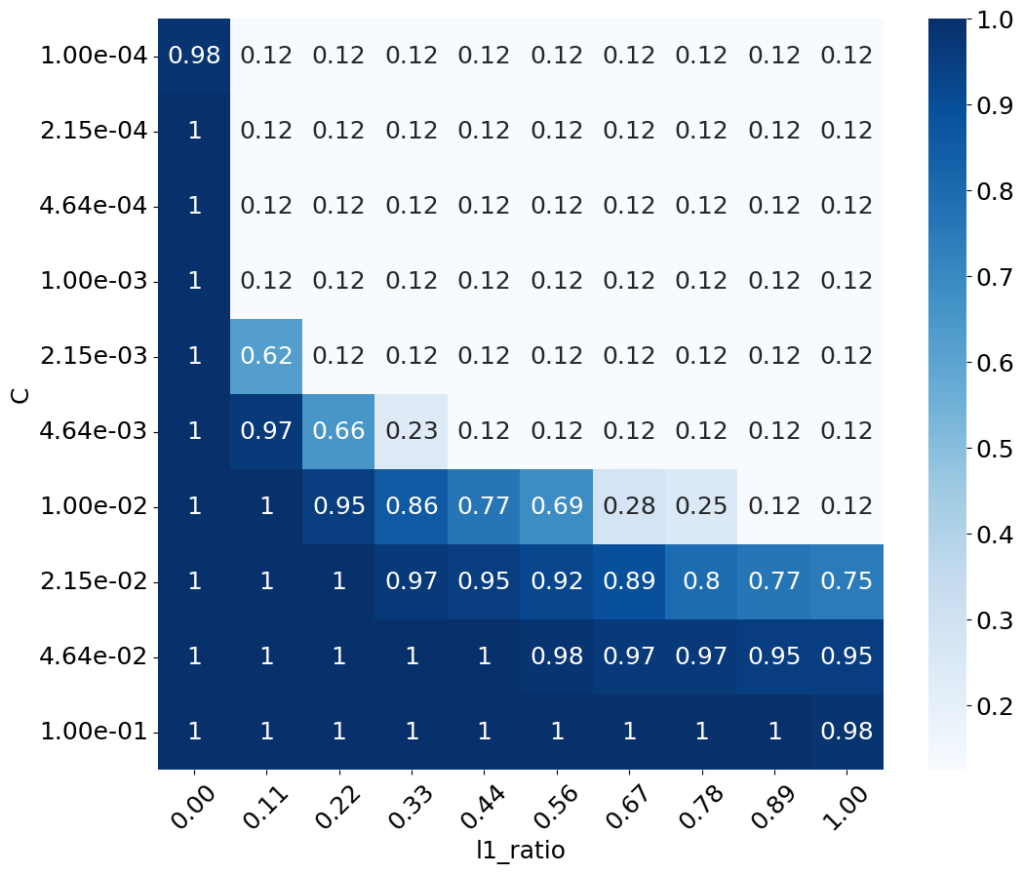
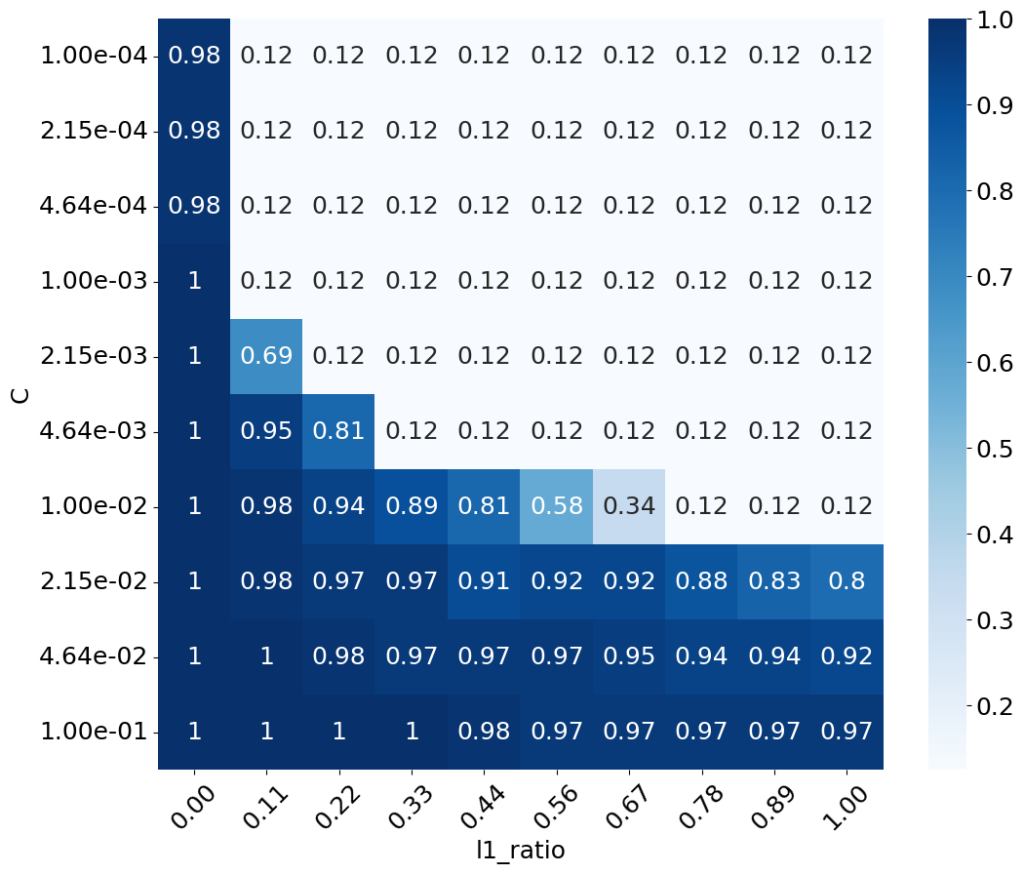
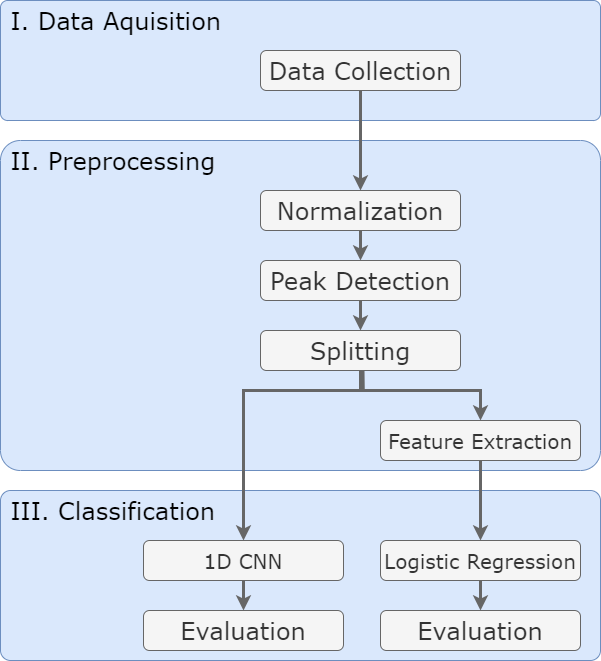
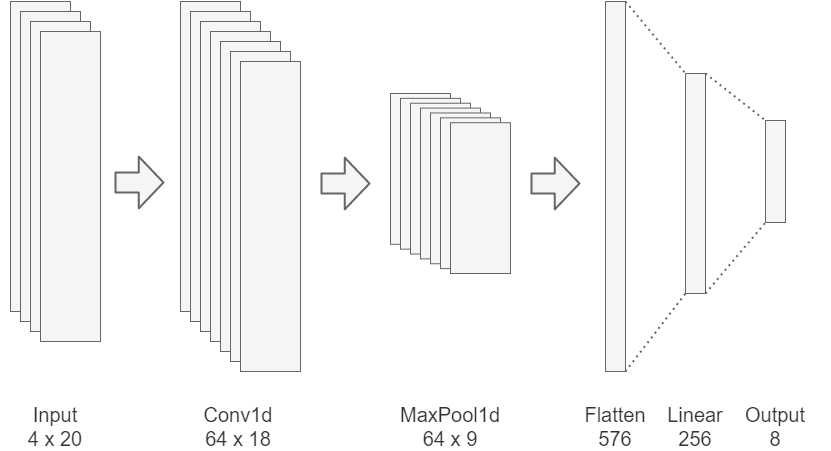
1次元畳み込みニューラルネットワーク(1D CNN)とロジスティック回帰モデルという機械学習アルゴリズムを使用して、触れた部分の識別精度を検証しました。1D CNNでは94.2%、ロジスティック回帰モデルでは95.9%という高い識別精度を達成しました。また、素材の柔らかさが識別性能に与える影響も調査し、柔らかい素材の違いが分類精度にどのように影響するかを明らかにしました。
この技術の応用範囲は広く、家庭用ペットロボットだけでなく、赤ちゃんや高齢者のモニタリングにも利用できます。例えば、柔らかいロボットは、赤ちゃんや高齢者の状態を見守るためのデバイスとしても役立つでしょう。触覚によるコミュニケーションが重要な場面で、柔らかいロボットは特に有効です。
私たちの研究は、柔らかい素材と機械学習を組み合わせた新しい技術を用いて、触れ合いを通じた豊かな情報交換を実現するロボットを開発しています。
今後は、この技術をさらに発展させ、さまざまな環境で機能するソフトロボットの設計と応用を進めていく予定です。この研究が、未来のロボット技術の一端を担うことを目指し、引き続き研究を進めていきます。
| Year | Name | Title | Conference |
|---|---|---|---|
| 2022 | Ikuma Sudo, Jun Ogawa, Yosuke Watanabe, MD Nahin Islam Shiblee, Ajit, Khosla, Masaru Kawakami, Hidemitsu Furukawa | Local Discrimination Based on Piezoelectric Sensing in Robots Composed of Soft Matter with Different Physical Properties | Journal of Robotics and Mechatronics |
| 2021 | Ikuma Sudo, Yosuke Watanabe, MD Nahin, Islam Shiblee, Ajit Khosla, Jun Ogawa, Masaru Kawakami, Hidemitsu Furukawa | Soft Matter Machine Learning Based on Piezoelectric Sensors – Highly Accurate Contact Part Recognition in Owl-Shaped Soft Robots – | ICTSGS2021 |
| 2022 | 須藤 郁馬, 小川 純, 渡邉 洋輔, MD Nahin Islam Shiblee・Ajit Khosla, 川上勝, 古川英光 | フクロウ型ソフトロボットによる接触部位の識別 | 第33回高分子ゲル研究討論会 |